 Aether
免费
Aether
免费
-
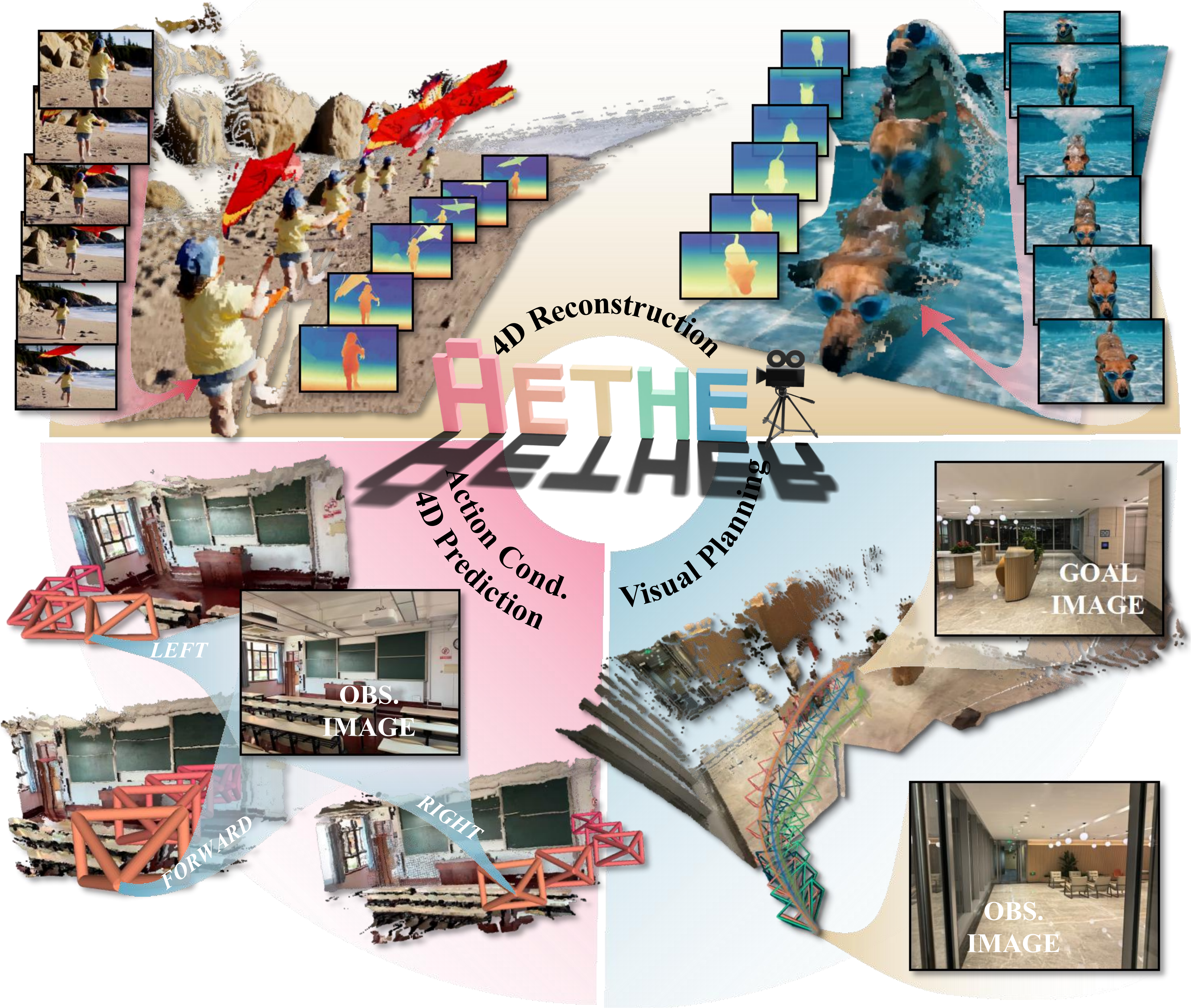
Aether 是几何感知世界模型框架,把动态重建、动作条件视频预测和目标导向视觉规划统一到同一套架构中,适合研究型团队做世界模型基础验证。
Aether 工具正文
Aether 的核心参数与统计
| 参数 | 当前公开信息 | 说明 |
|---|---|---|
| 产品定位 | 开源世界模型研究框架 | 不是商用 SaaS,而是研究基础设施 |
| 核心任务 | 4D 重建、视频预测、视觉规划 | 三任务统一架构 |
| 许可协议 | MIT License | 可用于研究与商业 |
| 模型权重 | 公开(Hugging Face) | AetherV1 可直接下载 |
| 推理环境要求 | Linux + CUDA + ≥24GB VRAM | 需要 GPU 资源 |
Aether 的设计出发点:世界模型的价值不只在"生成好看的视频",而在能否同时理解几何空间、预测动作结果并支持目标规划。
Aether 的用户与市场认可
- InternRobotics 是具有一定学术背景的团队,项目以 MIT License 开源,说明它对研究和商业应用均保持开放。
- 2025 年内从论文提交到 AetherV1 公开发布节奏紧凑,说明项目处于积极推进阶段。
- 公开引用量和企业用户数未披露;更适合把它视为研究社区工具而不是成熟商业产品。
Aether 的成本优势
- C 端/个人:不面向普通个人用户,更适合有 GPU 资源的研究者。
- 开发者/研究者:MIT 许可证公开,下载权重免费;主要成本是 GPU 计算资源。
- 企业/私有化:没有商业采购页;企业如果要用需要自行评估 GPU 资源和工程接入成本。
它的真实隐性收益是减少从零搭建世界模型实验环境的时间;隐性成本是高 VRAM 需求和对 Linux/CUDA 环境的依赖。
Aether 的主要功能
- 4D Dynamic Reconstruction:在动态场景中重建三维几何结构,区分静态背景与运动物体。
- Action-conditioned Video Prediction:以摄像机轨迹为动作条件,预测对应的未来视频帧序列。
- Goal-conditioned Visual Planning:给定目标状态,推断到达目标所需的视觉路径序列。
- 本地 Gradio Demo:官方提供可直接运行的交互 demo,方便快速验证。
- 公开模型权重与推理代码:AetherV1 权重托管在 Hugging Face,推理脚本在 GitHub 仓库公开。
Aether 的模型与版本演进
- 2025-03-24 / arXiv v1:论文初版提交,公开方法描述与定量评测。
- 2025-03-28 / AetherV1 全量发布:GitHub README 确认模型权重、项目网站、推理代码同步发布。
- 2025-07-28 / arXiv v3:论文修订版发布,更新评测与说明。
Aether 的迭代重点是研究完整性:先让方法可重现,再随后续工作扩展任务覆盖。
Aether 的技术优势
- 机制:几何重建与生成建模联合优化,共享空间表示。
效果:不同任务共用几何先验,减少多任务独立建模的一致性漂移。
适用场景:需要空间感知的世界模型研究、自动驾驶场景仿真。 - 机制:摄像机轨迹作为 geometry-informed action space。
效果:预测和规划使用更稳定的几何条件,而不是抽象 token。
适用场景:视觉规划、动作条件视频预测研究。 - 机制:三任务统一架构(重建 + 预测 + 规划)共享骨干网络。
效果:不需要为每个任务独立维护模型,降低研究迭代成本。
适用场景:世界模型基础研究、具身智能多任务验证。
Aether 的如何使用
- 入门路径:克隆 GitHub 仓库 → 安装依赖(CUDA、torch、gradio 等)→ 下载 AetherV1 权重 → 运行本地 demo。
- 研究路径:在 AetherV1 基础上设计实验 → 修改任务条件 → 评测三任务性能。
- 工程接入路径:按 MIT 许可证条款修改和集成到自己的研究或应用场景。
Aether 的产品定价
| 层级 | 当前公开状态 | 说明 |
|---|---|---|
| 研究使用 | 免费(MIT License) | 权重、代码、文档均开源 |
| 商业使用 | 允许(MIT License) | 需遵守 MIT 条款 |
| 托管服务 | 未公开 | 暂无商业 API 或托管方案 |
对大多数研究团队来说,主要成本不是 license,而是 GPU 资源和工程适配时间。
Aether 的应用场景
- 世界模型基础研究:验证几何感知下的统一建模方法。
- 自动驾驶场景仿真:动作条件视频预测可用于驾驶场景测试。
- 具身智能规划验证:目标条件视觉规划适合机器人抓取和导航任务原型验证。
Aether 的适用人群
- 世界模型研究者:验证几何感知统一建模方法的研究团队。
- 机器人/具身智能工程师:需要 4D 重建和视觉规划联合验证的团队。
- 自动驾驶算法团队:做场景动态预测和视觉规划研究的技术团队。
不适配边界:它不是开箱即用的商用视频生成 SaaS;没有 GPU 资源和 Linux 工程能力的团队无法直接使用。
Aether 的总结与展望
Aether 是目前少有的把 4D 重建、视频预测和视觉规划三任务统一在同一架构里做的开源世界模型框架。它适合想在几何感知方向做深度研究的团队,不适合直接拿来做内容生产。接下来最值得关注的是后续版本是否会扩展到更大规模数据集训练以及是否有企业合作推动工程化落地。
参考来源
- https://aether-world.github.io/
- https://github.com/InternRobotics/Aether
- https://arxiv.org/abs/2503.18945
- https://huggingface.co/AetherWorldModel/AetherV1
版本信息
- AetherV1 :GitHub README 明确标注 AetherV1 模型权重、论文、项目网站和推理代码均已发布。
- arXiv v1 Submission :论文初版提交 arXiv,首次公开 Aether 方法与评测结果。
用户评价